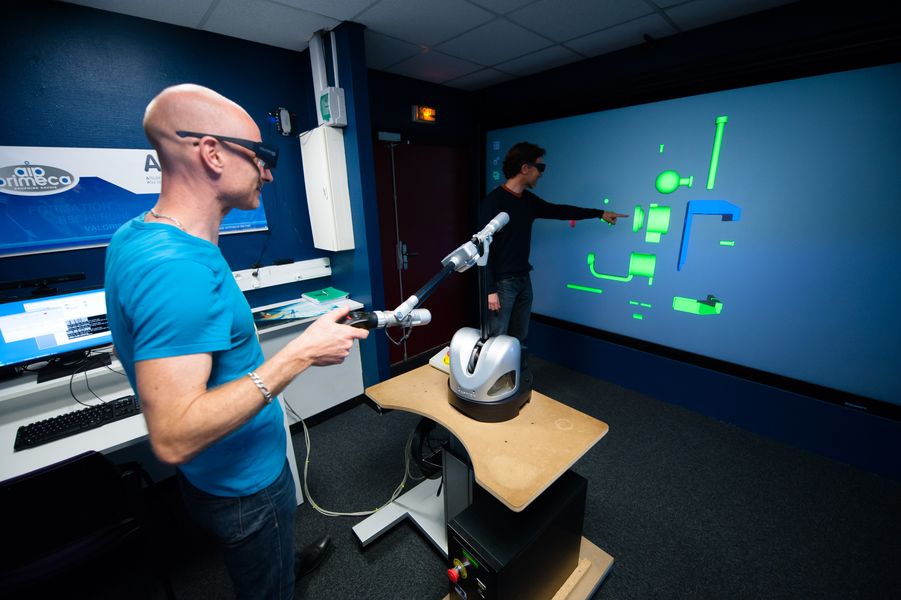
Nous disposons d’une interface haptique à retour de force auquel est associé un écran stéréoscopique rétro-projeté de 3m sur 2m. Lors de manipulation d’objets virtuels dans l’espace 3D, la stéréoscopie immerge les acteurs de manière significative. Un bras à retour d’effort permet la formation d’opérateurs via de l’apprentissage de gestes, le contrôle d’accessibilité ou l étude d’ergonomie de postes de travail. Dans le cadre d’une association avec une interface robotique, il peut être déployé dans des situations à risque pour l’opérateur, ou lors de manipulations sur des sites distants (dans le cadre d’opération chirurgicale par exemple).