Les partenaires du projet
Coordinateur du projet :
Hélène CHANAL (Clermont Auvergne INP)
Partenaires du projet :
Laboratoire G-SCOP, DPRI, ALMA
Contexte et Objectifs du projet
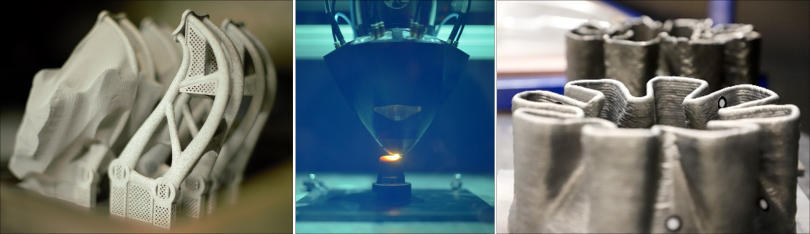
Le procédé WAAM est un procédé de fabrication additive qui est dérivé du soudage. Ce procédé permet un taux de dépôt de matière élevé et la fabrication de pièces de grandes dimensions. Généralement, ce procédé est mis en oeuvre par un robot. Ce procédé est particulièrement performant pour la fabrication de pièces comme les tubulures. La trajectoire que doit suivre le point piloté du robot est définie pour construire la pièce attendue par dépôts successifs de cordons simples de soudure. La fabrication WAAM permet une flexibilité de l’orientation de l’outil par rapport à la pièce qui ne nuit pas à sa qualité. L'objectif de ce projet est donc de définir un espace des possibles contenant l'ensemble des trajectoires de dépose possible pour la fabrication de tubulures complexes avec la qualité requise afin de calculer la trajectoire qui pilotera le robot de manière à respecter au mieux les contraintes cinématiques du procédé WAAM et du robot.
Dans ce projet, nous allons travailler sur la définition d'une chaîne numérique permettant à partir de la CAO de définir l'espace des trajectoires des possibles. Une activité expérimentale et de modélisation doit nous permettra de définir les degrés de liberté et leurs limites permettant de borner l'espace des possibles en fonction des contraintes du procédé, des tolérances et des caractéristiques de la pièce à produire. Cet espace des possibles sera une des données d'entrée pour le calcul de la trajectoire pilotée au robot. Ce calcul passe par la mise en place d'une optimisation sous contraintes. Cette optimisation doit permettre de définir la trajectoire pilotant le robot respectant au mieux les contraintes cinématiques du procédé WAAM et du robot tout en garantissant l’absence de collisions et le respect de l'espace des possibles.
Informations sur le projet
- Porteur du projet: CHANAL Hélène (Sigma Clermont)
- Responsable scientifique G-SCOP : VIGNAT Frederic
- Durée: 2021 - 2025
- Organisme de financement : Région Auvergne Rhône Alpes
Responsable
Ledoux Yann
Professeur des Universités Grenoble INP - Génie Industriel
UMR 5272 - G-SCOP - Resp. équipe CIPP
46 Av. Félix Viallet, 38000 Grenoble
C 301
04 76 57 43 17
Professeur des Universités Grenoble INP - Génie Industriel
UMR 5272 - G-SCOP - Resp. équipe CIPP
46 Av. Félix Viallet, 38000 Grenoble
C 301
04 76 57 43 17